จำหลักการของมอเตอร์และสูตรสำคัญหลายๆ สูตร แล้วคิดหามอเตอร์ได้ง่ายๆ!
มอเตอร์ หรือที่เรียกกันโดยทั่วไปว่ามอเตอร์ไฟฟ้าหรือที่เรียกว่ามอเตอร์ เป็นสิ่งที่พบเห็นได้ทั่วไปในอุตสาหกรรมและชีวิตสมัยใหม่ และยังเป็นอุปกรณ์ที่สำคัญที่สุดในการแปลงพลังงานไฟฟ้าเป็นพลังงานกลมอเตอร์ได้รับการติดตั้งในรถยนต์ รถไฟความเร็วสูง เครื่องบิน กังหันลม หุ่นยนต์ ประตูอัตโนมัติ ปั๊มน้ำ ฮาร์ดไดรฟ์ และแม้แต่โทรศัพท์มือถือทั่วไปของเรา หลายๆ คนที่เพิ่งรู้จักมอเตอร์หรือเพิ่งเรียนรู้ความรู้เรื่องการขับรถอาจรู้สึกว่าความรู้เรื่องมอเตอร์เข้าใจยากและแม้แต่ดูหลักสูตรที่เกี่ยวข้องด้วยซ้ำ และพวกเขาถูกเรียกว่า “นักฆ่าเครดิต”การแบ่งปันแบบกระจัดกระจายต่อไปนี้สามารถช่วยให้สามเณรเข้าใจหลักการของมอเตอร์อะซิงโครนัสแบบ AC ได้อย่างรวดเร็ว หลักการของมอเตอร์: หลักการของมอเตอร์นั้นง่ายมากพูดง่ายๆ ก็คือเป็นอุปกรณ์ที่ใช้พลังงานไฟฟ้าเพื่อสร้างสนามแม่เหล็กที่กำลังหมุนอยู่บนขดลวดและดันโรเตอร์ให้หมุนใครก็ตามที่เคยศึกษากฎของการเหนี่ยวนำแม่เหล็กไฟฟ้าจะรู้ดีว่าขดลวดที่มีพลังงานจะถูกบังคับให้หมุนในสนามแม่เหล็กนี่คือหลักการพื้นฐานของมอเตอร์นี่คือความรู้ฟิสิกส์ระดับมัธยมศึกษาตอนต้น โครงสร้างมอเตอร์: ใครก็ตามที่ได้ถอดชิ้นส่วนมอเตอร์จะรู้ดีว่ามอเตอร์ส่วนใหญ่ประกอบด้วยสองส่วน ส่วนสเตเตอร์คงที่และส่วนโรเตอร์หมุน ดังนี้ แกนสเตเตอร์: ส่วนสำคัญของวงจรแม่เหล็กของมอเตอร์ซึ่งวางขดลวดสเตเตอร์ไว้ ขดลวดสเตเตอร์: มันคือขดลวดซึ่งเป็นส่วนวงจรของมอเตอร์ซึ่งเชื่อมต่อกับแหล่งจ่ายไฟและใช้ในการสร้างสนามแม่เหล็กหมุน ฐานเครื่อง: แก้ไขแกนสเตเตอร์และฝาครอบท้ายมอเตอร์ และมีบทบาทในการป้องกันและการกระจายความร้อน แกนโรเตอร์: ส่วนสำคัญของวงจรแม่เหล็กของมอเตอร์ ขดลวดโรเตอร์จะถูกวางไว้ในช่องแกน ขดลวดโรเตอร์: การตัดสนามแม่เหล็กที่กำลังหมุนของสเตเตอร์เพื่อสร้างแรงเคลื่อนไฟฟ้าและกระแสไฟฟ้าเหนี่ยวนำ และสร้างแรงบิดแม่เหล็กไฟฟ้าเพื่อหมุนมอเตอร์ 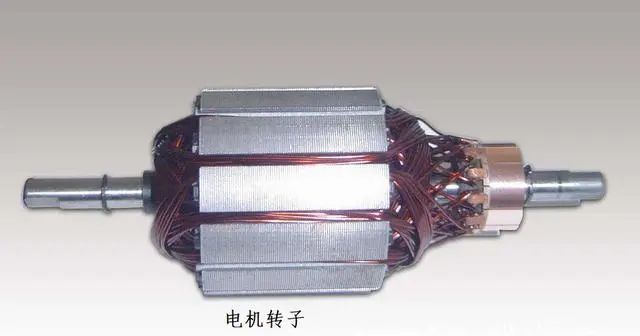
สูตรการคำนวณหลายประการของมอเตอร์: 1. แม่เหล็กไฟฟ้าที่เกี่ยวข้อง 1) สูตรแรงเคลื่อนไฟฟ้าเหนี่ยวนำของมอเตอร์: E=4.44*f*N*Φ, E คือแรงเคลื่อนไฟฟ้าของขดลวด, f คือความถี่, S คือพื้นที่หน้าตัดของตัวนำโดยรอบ (เช่น เหล็ก แกนกลาง) N คือจำนวนรอบ และ Φ คือ Pass แม่เหล็ก สูตรได้มาอย่างไรเราจะไม่เจาะลึกสิ่งเหล่านี้เราจะมาดูวิธีใช้เป็นหลักแรงเคลื่อนไฟฟ้าเหนี่ยวนำเป็นสาระสำคัญของการเหนี่ยวนำแม่เหล็กไฟฟ้าหลังจากปิดตัวนำที่มีแรงเคลื่อนไฟฟ้าเหนี่ยวนำแล้ว จะเกิดกระแสเหนี่ยวนำขึ้นกระแสเหนี่ยวนำนั้นขึ้นอยู่กับแรงแอมแปร์ในสนามแม่เหล็ก ทำให้เกิดโมเมนต์แม่เหล็กที่จะดันขดลวดให้หมุน จากสูตรข้างต้นเป็นที่ทราบกันว่าขนาดของแรงเคลื่อนไฟฟ้าเป็นสัดส่วนกับความถี่ของแหล่งจ่ายไฟ จำนวนรอบของขดลวด และฟลักซ์แม่เหล็ก สูตรการคำนวณฟลักซ์แม่เหล็ก Φ=B*S*COSθ เมื่อระนาบที่มีพื้นที่ S ตั้งฉากกับทิศทางของสนามแม่เหล็ก มุม θ คือ 0, COSθ เท่ากับ 1 และสูตรกลายเป็น Φ=B*S . 
เมื่อรวมสองสูตรข้างต้นเข้าด้วยกัน คุณจะได้สูตรสำหรับคำนวณความเข้มฟลักซ์แม่เหล็กของมอเตอร์: B=E/(4.44*f*N*S) 2) อีกสูตรคือสูตรแรงแอมแปร์หากต้องการทราบว่าขดลวดรับแรงเท่าใด เราต้องใช้สูตรนี้ F=I*L*B*sinα โดยที่ I คือความแรงของกระแส L คือความยาวของตัวนำ B คือความแรงของสนามแม่เหล็ก α คือมุมระหว่าง ทิศทางของกระแสและทิศทางของสนามแม่เหล็กเมื่อลวดตั้งฉากกับสนามแม่เหล็ก สูตรจะกลายเป็น F=I*L*B (หากเป็นขดลวด N-turn ฟลักซ์แม่เหล็ก B จะเป็นฟลักซ์แม่เหล็กทั้งหมดของขดลวด N-turn และไม่มี ต้องคูณ N) ถ้ารู้จักแรงก็จะรู้แรงบิดแรงบิดเท่ากับแรงบิดคูณด้วยรัศมีการกระทำ T=r*F=r*I*B*L (ผลคูณเวกเตอร์)ด้วยสูตรกำลังสองสูตร = แรง * ความเร็ว (P = F * V) และความเร็วเชิงเส้น V = 2πR * ความเร็วต่อวินาที (n วินาที) สามารถสร้างความสัมพันธ์กับกำลังได้ และสูตรของหมายเลข 3 ต่อไปนี้สามารถทำได้ จะได้รับอย่างไรก็ตาม ควรสังเกตว่าขณะนี้มีการใช้แรงบิดเอาท์พุตจริง ดังนั้นกำลังที่คำนวณได้คือกำลังเอาท์พุต 2. สูตรการคำนวณความเร็วของมอเตอร์อะซิงโครนัส AC: n=60f/P ซึ่งง่ายมาก ความเร็วเป็นสัดส่วนกับความถี่ของแหล่งจ่ายไฟ และแปรผกผันกับจำนวนขั้วคู่ (จำคู่หนึ่ง) ) ของมอเตอร์ เพียงใช้สูตรโดยตรงอย่างไรก็ตาม สูตรนี้จะคำนวณความเร็วซิงโครนัสจริง ๆ (ความเร็วของสนามแม่เหล็กหมุน) และความเร็วจริงของมอเตอร์อะซิงโครนัสจะต่ำกว่าความเร็วซิงโครนัสเล็กน้อย ดังนั้น เรามักจะเห็นว่าโดยทั่วไปมอเตอร์ 4 ขั้วมากกว่า 1,400 รอบต่อนาที แต่น้อยกว่า 1,500 รอบต่อนาที 3. ความสัมพันธ์ระหว่างแรงบิดของมอเตอร์และความเร็วของมิเตอร์กำลัง: T=9550P/n (P คือกำลังของมอเตอร์, n คือความเร็วของมอเตอร์) ซึ่งสามารถอนุมานได้จากเนื้อหาข้อ 1 ข้างต้น แต่เราไม่จำเป็นต้องเรียนรู้ เพื่อสรุปให้จำการคำนวณนี้สูตรจะทำแต่ขอเตือนอีกครั้งว่ากำลัง P ในสูตรไม่ใช่กำลังไฟฟ้าเข้า แต่เป็นกำลังไฟฟ้าเอาท์พุตเนื่องจากการสูญเสียของมอเตอร์ กำลังอินพุตจึงไม่เท่ากับกำลังเอาต์พุตแต่หนังสือมักจะถูกทำให้เป็นอุดมคติ และกำลังไฟฟ้าเข้าก็เท่ากับกำลังไฟฟ้าเอาท์พุต 
4. กำลังมอเตอร์ (กำลังไฟฟ้าเข้า): 1) สูตรการคำนวณกำลังมอเตอร์เฟสเดียว: P=U*I*cosφ หากตัวประกอบกำลังคือ 0.8 แรงดันไฟฟ้าคือ 220V และกระแสคือ 2A ดังนั้นกำลัง P=0.22×2×0.8=0.352KW 2) สูตรการคำนวณกำลังมอเตอร์สามเฟส: P=1.732*U*I*cosφ (cosφ คือตัวประกอบกำลัง U คือแรงดันไฟฟ้าของสายโหลด และ I คือกระแสของสายโหลด)อย่างไรก็ตาม U และ I ประเภทนี้เกี่ยวข้องกับการเชื่อมต่อของมอเตอร์ในการเชื่อมต่อแบบดาว เนื่องจากปลายทั่วไปของคอยล์ทั้งสามที่คั่นด้วยแรงดันไฟฟ้า 120° เชื่อมต่อเข้าด้วยกันจนกลายเป็นจุด 0 จริงๆ แล้วแรงดันไฟฟ้าที่โหลดบนคอยล์โหลดจึงเป็นแบบเฟสต่อเฟสเมื่อใช้วิธีการเชื่อมต่อแบบเดลต้า สายไฟจะเชื่อมต่อกับปลายแต่ละด้านของคอยล์แต่ละอัน ดังนั้นแรงดันไฟฟ้าบนคอยล์โหลดจึงเป็นแรงดันไฟฟ้าของสายไฟหากใช้แรงดันไฟฟ้า 3 เฟส 380V ที่ใช้กันทั่วไป ขดลวดจะเป็น 220V ในการเชื่อมต่อแบบสตาร์ และเดลต้าคือ 380V, P=U*I=U^2/R ดังนั้นพลังงานในการเชื่อมต่อเดลต้าคือการเชื่อมต่อแบบสตาร์ 3 ครั้ง ซึ่งเป็นเหตุผลว่าทำไมมอเตอร์กำลังสูงจึงใช้สเต็ปดาวน์แบบสตาร์-เดลต้าเพื่อสตาร์ท หลังจากเชี่ยวชาญสูตรข้างต้นและทำความเข้าใจอย่างถี่ถ้วนแล้ว หลักการของมอเตอร์จะไม่สับสน และคุณจะไม่กลัวที่จะเรียนรู้หลักสูตรการขับขี่มอเตอร์ระดับสูง 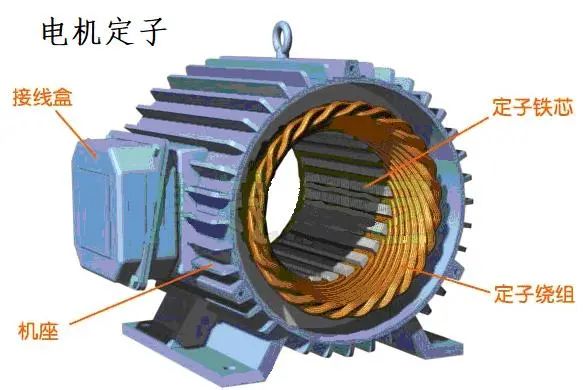
1) พัดลม: โดยทั่วไปจะติดตั้งที่ส่วนท้ายของมอเตอร์เพื่อกระจายความร้อนไปยังมอเตอร์ 2) กล่องรวมสัญญาณ: ใช้เชื่อมต่อกับแหล่งจ่ายไฟ เช่น มอเตอร์อะซิงโครนัสสามเฟส AC นอกจากนี้ยังสามารถเชื่อมต่อกับสตาร์หรือเดลต้าได้ตามความต้องการ 3) แบริ่ง: เชื่อมต่อส่วนที่หมุนและอยู่กับที่ของมอเตอร์ 4. ฝาครอบท้าย: ฝาครอบด้านหน้าและด้านหลังด้านนอกมอเตอร์มีบทบาทสนับสนุน
เวลาโพสต์: 13 มิ.ย. 2022